N°04-2022
Enunciado
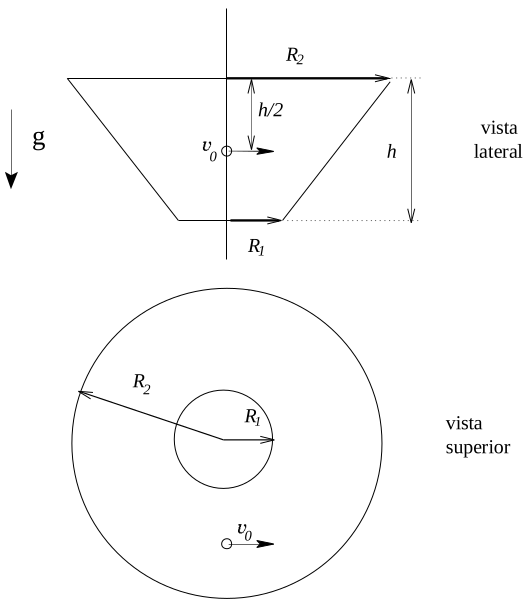
Una partícula en un campo gravitatorio constante desliza sobre la superficie con forma de cono truncado invertido. A $t=0$ la partícula se encuentra a mitad de la altura del cono, como se indica en la figura, y con una velocidad $v_0$ puramente horizontal. Se desprecian los efectos del rozamiento.
En la imagen de la vista superior, indicar cualitativamente posibles trayectorias de la partícula para distintos valores del módulo de la velocidad $v_0$.
Determinar el rango de los valores de $v_0$ para el cual la partícula nunca abandona la superficie.
Sugerencias
Una pequeña ayuda antes de la resolución, a modo de receta, para que lo intentes por tu cuenta.
1)
A) Expresas la conservación de la energía mecánica usando coordenadas cilíndricas, $$ E = \frac{1}{2} m \left(\dot{r}^2 +r^2\dot{\theta}^2+\dot{z}^2 \right) + mgz. $$
B) Aprovecha la dependencia entre $z$ y $r$, $$ z = z(r), $$ para independizarte de $z$ en la energía potencial, y su derivada $$ \dot{z} = \frac{dz}{dr} \dot{r} $$ para independizarte de $\dot{z}$ en la energía cinética.
C) Como no hay torques en la dirección $z$, se conserva la correspondiente coordenada del momento angular $$ L_z = m r^2 \dot{\theta}, $$ que podes usar para independizarte de $\dot{\theta}$ en la energía cinética.
D) Con lo anterior podes reorganizar los términos de la energía mecánica con una estructura del tipo $$ E= T_{ef} (\dot{r}) + U_{ef} (r) $$ que reduce el problema un movimiento unidimensional efectivo, energía cinética $T_{ef}$ y energía potencial $U_{ef}$ (esta es la llamada energía potencial efectiva).
F) Como $T_{ef}\geq 0$ entonces $U_{ef} (r) \leq E$ para todo $r$. Entonces, si analizas la estructura funcional de $U_{ef} (r)$ y analizas los posibles valores de $E$, vas a obtener información que te dirá cuáles son los valores accesibles de $r$ y cuáles no. Esa información, combinada con la anterior, te sirve para deducir las posibles trayectorias.
2)
Hay que imponer que en $R_1$ y $R_2$ las velocidades sean sólo en la dirección $\hat{\theta}$. Con el primer caso se obtiene una velocidad mínima y con el segundo una velocidad máxima.
Resolución
Actualmente es muy poco común que el concepto de energía potencial efectiva se trate en los cursos de física básica universitaria. Por esta razón, la siguiente resolución pretende usar este problema como excusa para introducir a los estudiantes en los elementos teóricos que dan lugar a su definición.
1)
Cuando las partículas se mueven sometidas a fuerzas centrales o cuando se ven obligadas a moverse, sin fricción, en una superficie de revolución (simetría cilíndrica, como el caso de un cono) suele ser muy útil recurrir al concepto de energía potencial efectiva.
La introducción de este concepto y su gran utilidad surgen como una consecuencia de la simetría y la conservación de algunas magnitudes, a saber:
- la simetría cilíndrica de la superficie de revolución;
- la conservación de una de las componentes del momento angular;
- la conservación de la energía mecánica.
Su conjugación permite traducir un movimiento tridimensional a un movimiento efectivo unidimensional de más fácil tratamiento. En este movimiento efectivo sigue valiendo la conservación de la energía, pudiendo recurrir a ella para obtener rápidamente información cualitativa del movimiento. Incluso, con un poco de trabajo podemos recurrir a información cuantitativa.
Veamos paso a paso cómo se procede, sin olvidar que pretendemos desarrollar el problema en cuestión. Dejo al lector cualquier extrapolación para aplicar la misma idea a otros problemas. Por ejemplo, al único problema de desarrollo del año 1997.
Lo que veremos a continuación es como cada uno de los aspectos detallados anteriormente permiten independizarnos de las coordenadas hasta quedarnos con sólo una de ellas, la cual permite caracterizar el movimiento.
Superficie de revolución
La superficie de revolución sugiere la elección de un sistema de coordenadas cilíndricas $(r,\theta,z)$. Con ellas es posible caracterizar la superficie a través de una relación entre $z$ y $r$ que es independiente de $\theta$,
$$ z = f(r). $$
En este ejemplo, la superficie del cono puede interpretarse como aquella formada por el «trazo» que deja una recta
$$ z= \gamma r \tag{1} $$
al rotarla respecto del eje $z$. Estamos tomando como origen de coordenadas el vértice del cono (aunque el cono sea truncado podemos concebir su vértice).
Una de las consecuencias de esta simetría es que es posible independizarse de alguna de las dos variables, $z$ o $r$, a través de la relación (1). Como el enunciado nos pide analizar el movimiento en la variable $r$, nos independizaremos de $z$. Para ello será necesario tener en cuenta que
$$ \gamma = \frac{h}{R_2-R_1} \tag{2} $$
Conservación de la componente $L_z$ del momento angular
Las consecuencias de la simetría no terminan aquí. Si medimos el torque de las fuerzas respecto de algún punto $O$ del eje de simetría $Z$, es sencillo ver que tanto la fuerza de contacto (normal a la superficie de revolución) como la fuerza gravitatoria no generan un torque en la dirección $z$ y, por lo tanto, debe conservarse la correspondiente coordenada del momento angular en esa dirección:
$$ L_z= m r^2 \dot{\theta}. $$
Dado que inicialmente la velocidad $v_0$ es puramente tangencial en
$$ r_0=\frac{R_1+R_2}{2}, \tag{3} $$
y en ese caso $L_z=mr_0v_0$, podemos expresar esta conservación de la siguiente forma:
$$ \dot{\theta} = \frac{r_0v_0}{r^2}, \tag{4} $$
que puede interpretarse como una dependencia de la forma $\dot{\theta} = g(r)$, que en el contexto adecuado (como veremos que sucede con la energía cinética) puede ser muy útil.
Conservación de la energía mecánica
Ahora veamos cómo expresar la energía mecánica del sistema para poder desarrollarla con la información obtenida. Teniendo en cuenta que la única fuerza conservativa presente es la gravitatoria, tendremos una energía potencial $mgz$ y por lo tanto la energía mecánica será:
$$ E = \frac{1}{2} m v^2 + mgz. $$
Luego, vale la pena recordar que la velocidad de la partícula en coordenadas cilíndricas es $\overline{v} = \dot{r} \hat{r}+r\dot{\theta} \hat{\theta}+\dot{z} \hat{z}$, entonces
$$ E = \frac{1}{2} m \left(\dot{r}^2 +r^2\dot{\theta}^2+\dot{z}^2 \right) + mgz. $$
Si ahora tenemos en cuenta las dependencias (1) y (4), y desarrollamos:
$$ \begin{split} E &= \frac{1}{2} m \left[ \dot{r}^2 +r^2\left(\frac{r_0v_0}{r^2}\right)^2+\gamma^2 \dot{r}^2 \right]+ mg\gamma r \\ &= \frac{1}{2} m \left(1+\gamma^2 \right)\dot{r}^2 +\frac{1}{2} m \left(\frac{r_0v_0}{r}\right)^2+ mg\gamma r \\ &= \frac{1}{2} m \left(1+\gamma^2 \right)\dot{r}^2 + mg\gamma \left[ \frac{v_0^2}{2g \gamma} \left(\frac{r_0}{r}\right)^2+ r \right]. \end{split} $$
Ahora detengámonos por unos instantes para entender la última expresión. Como fue nuestra intención, han desaparecido las coordenadas $z$, $\theta$ y sus derivadas temporales. También podemos analizar cada uno de estos dos términos que constituyen la energía mecánica, para reconocer que:
- el primero de ellos tiene la estructura de una suerte de energía cinética efectiva $$ T_{ef} (\dot{r}) = \frac{1}{2} m \left(1+\gamma^2 \right)\dot{r}^2, $$ asociada al movimiento de una partícula de masa $m \left(1+\gamma^2 \right)$ y velocidad $\dot{r}$;
- el segundo es una función sólo de la coordenada $r$, pudiéndo interpretarse como una energía potencial efectiva $$ U_{ef} (r) = mg\gamma \left[ \frac{v_0^2}{2g \gamma} \left(\frac{r_0}{r}\right)^2+ r \right] \tag{5} $$ de la misma partícula, cuya posición se caracteriza, justamente, por $r$.
Estas interpretaciones pueden concebirse como un movimiento unidimensional efectivo, caracterizado por la coordenada $r$ y de manera tal que la energía mecánica es
$$ E=T_{ef} (\dot{r})+U_{ef} (r). $$
Análisis del movimiento efectivo
Reducir el problema a una coordenada y de manera tal que se sigue cumpliendo la conservación de la energía, nos permite realizar un rápido análisis del movimiento. Basta con recordar que como la energía cinética no puede ser negativa, $T_{ef} \geq 0$, entonces la energía potencial no puede ser mayor a la mecánica
$$ U_{ef} (r) \leq E. \tag{6} $$
Es decir, para un valor de energía mecánica $E$ sólo son accesibles las posiciones de la partícula tales que la coordenada $r$ verifica esta condición. Sólo con este hecho podemos obtener una valiosa información cuantitativa de las posibles trayectorias. Para ello debemos estudiar la dependencia funcional de la energía potencial efectiva con $r$.
Vemos en la definición (5) que $U_{ef} (r)$ divergencia en $r=0$ y tiende a una recta de pendiente $mg\gamma$ cuando $r \to \infty$. Esto insinúa la existencia de al menos un mínimo en algún valor finito $r_m$. Veamos si esto es así, busquemos los valores críticos $r_c$ pidiendo que
$$ \left.\frac{d U_{ef}}{dr} \right|_{r_c} = 0 $$
es decir,
$$ \begin{split} \frac{d}{dr} \left[ \frac{v_0^2}{2g \gamma} \left(\frac{r_0}{r}\right)^2+ r \right]_{r_c} &= 0 \\ \left[ -\frac{v_0^2}{g \gamma} \frac{r_0^2}{r^3}+ 1 \right]_{r_c} &= 0 \\ -\frac{v_0^2}{g \gamma} \frac{r_0^2}{r_c^3}+ 1 &= 0 \\ 1 &= \frac{v_0^2}{g \gamma} \frac{r_0^2}{r_c^3} \\ 1 &= \frac{v_0^2}{g \gamma r_0} \frac{r_0^3}{r_c^3} \end{split} $$
es decir, la energía potencial efectiva es mínima en $r_c$ tal que
$$ \left(\frac{r_c}{r_0}\right)^3 = \frac{v_0^2}{g \gamma r_0}. \tag{7} $$
Para poder analizar los distintos movimientos posibles, es suficiente con reconocer la existencia de este valor mínimo de la energía potencial efectiva, no es determinante su valor precisamente. Nos alcanza con poder graficar a mano alzada la energía potencial, como se muestra en la Figura A1

Figura A1
Caso 1
Sabiendo lo anterior, podemos analizar qué sucede al imponer la desigualdad $U_{ef} \leq E$ para diferentes valores de energía mecánica.

Figura A2
Comencemos con aquella situación singular en que la energía mecánica adquiere un valor $E_1$ coincidente con el mínimo de energía potencial efectiva (Figura A2). Es fácil darse cuenta que para cualquier valor de $r$ distinto de $r_c$ la energía potencial es mayor a $E_1$, lo cual es imposible. Así, para este valor de energía la partícula sólo puede acceder a un único valor de $r$, que es $r_c$. Como es el único, debe coincidir con el valor inicial $r_0$. Es decir, $r=r_c=r_0$ y reemplazando esto en las relaciones (4) y (5), obtenemos que
$$ \begin{cases} \dot{\theta} &= \frac{v_0}{r_0} \\ v_0 &= \sqrt{g \gamma r_0} \end{cases} $$
lo cual nos dice que la partícula realizará un movimiento circular a una velocidad constante (Figura A3) que debe ser igual a $v_0 = \sqrt{g \gamma r_0}$, que a la luz de las definiciones (2) y (3) es
$$ v_0 = \sqrt{\frac{2g h (R_1+R_2)}{(R_2-R_1)}}. $$

Figura A3
Caso 2
Luego, a modo de ejercicio mental, podemos pensar en el caso paradigmático en que la energía mecánica tiene en un valor $E_2<E_1$ (Figura A4) y darnos cuenta que en ese caso ¡cualquier valor de $r$ es inaccesible!
Caso 3

Figura A4
Finalmente, cuando la energía es mayor al valor mínimo de energía potencial $E_3>E_1$, vemos que los valores posibles de $r$ se encuentran en un rango limitado por un valor mínimo $r_m$ y máximo $r_M$ (Figura A5). ¿Qué sucede en tales valores? Allí la energía potencial efectiva coincide con la energía mecánica y por lo tanto la energía cinética efectiva es nula. Es decir, en los extremos del intervalo $\dot{r}=0$ y por lo tanto $\dot{z}=0$. Lo cual nos dice que la partícula deja de bajar al llegar al valor $r_m$ y deja de subir al llegar a $r_M$. En otras palabras la velocidad sólo tiene componente tangencial (en la dirección $\hat{\theta}$).

Figura A5
Como sólo en los valores extremos $r_m$ y $r_M$ la velocidad es tangencial, entonces $r_0$ debe coincidir con alguno de ellos. Una posibilidad es que $r_0$ sea el valor máximo, de manera que una vez iniciado el movimiento $r$ irá disminuyendo hasta el valor mínimo $r_m$ para luego volver a aumentar hasta $r_0$, y así sucesivamente, realizando un movimiento como el representado en la Figura A6 donde $r_M=r_0$ y $r_m=R_1$.

Figura A6
Otra posibilidad es que el valor mínimo es $r_m=r_0$, como el representado en la Figura A7 donde $r_M=R_2$.

Figura A7
2)
La energía mecánica puede determinarse teniendo en cuenta que inicialmente $\dot{r}_0=\dot{z}_0=0$, entonces $E=U_{ef} (r_0)$ y, por lo tanto, a la luz de la relación (5) $$ E= mg\gamma \left[ \frac{v_0^2}{2g \gamma} + r_0 \right]. \tag{8} $$
Velocidad inicial mínima
La velocidad inicial mínima $v_{0-\text{min}}$ para que la partícula no se escape por abajo, corresponde al caso en que la trayectoria de la partícula tiene el valor mínimo $r_m=R_1$, en el cual la energía mecánica es igual a la energía potencial efectiva (allí la velocidad también tiene solo componente en la dirección $\hat{\theta}$). Es decir,
$$ E = U_{ef} (R_1) = mg\gamma \left[ \frac{v_{0-\text{min}}^2}{2g \gamma} \left(\frac{r_0}{R_1}\right)^2+ R_1 \right]. $$
Aprovechando la relación (8)
$$ \begin{split} mg\gamma \left[ \frac{v_{0-\text{min}}^2}{2g \gamma} \left(\frac{r_0}{R_1}\right)^2+ R_1 \right] &= mg\gamma \left[ \frac{v_{0-\text{min}}^2}{2g \gamma} + r_0 \right] \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left(\frac{r_0}{R_1}\right)^2 - \frac{v_{0-\text{min}}^2}{2g \gamma} &= r_0 - R_1 \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left(\frac{r_0}{R_1}\right)^2 - \frac{v_{0-\text{min}}^2}{2g \gamma} &= r_0 - R_1 \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left[ \left(\frac{r_0}{R_1}\right)^2 - 1 \right] &= r_0 - R_1 \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left[ \frac{r_0^2-R_1^2}{R_1^2 } \right] &= r_0 - R_1 \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left[ \frac{(r_0+R_1)(r_0-R_1)}{R_1^2 } \right] &= r_0 - R_1 \\ \frac{v_{0-\text{min}}^2}{2g \gamma} \left[ \frac{r_0+R_1}{R_1^2 } \right] &= 1 \\ \end{split} $$
entonces $$ v_{0-\text{min}}= \sqrt{2g \gamma \frac{R_1^2}{r_0+R_1 }} $$
y recordando las definiciones (2) y (3): $$ \boxed{v_{0-\text{min}}= \sqrt{ \frac{4ghR_1^2}{(R_1+R_2)(3R_1+R_2) }}} $$
Velocidad inicial máxima
De forma completamente análoga, la velocidad inicial máxima $v_{0-\text{máx}}$ se obtiene imponiendo que $r_M=R_2$ y por lo tanto
$$ E = U_{ef} (R_2) = mg\gamma \left[ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left(\frac{r_0}{R_2}\right)^2+ R_2 \right]. $$
entonces
$$ \begin{split} mg\gamma \left[ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left(\frac{r_0}{R_2}\right)^2+ R_2 \right] &= mg\gamma \left[ \frac{v_{0-\text{min}}^2}{2g \gamma} + r_0 \right] \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left(\frac{r_0}{R_2}\right)^2 - \frac{v_{0-\text{máx}}^2}{2g \gamma} &= r_0 - R_2 \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left(\frac{r_0}{R_2}\right)^2 - \frac{v_{0-\text{máx}}^2}{2g \gamma} &= r_0 - R_2 \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left[ \left(\frac{r_0}{R_2}\right)^2 - 1 \right] &= r_0 - R_2 \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left[ \frac{r_0^2-R_2^2}{R_2^2 } \right] &= r_0 - R_2 \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left[ \frac{(r_0+R_2)(r_0-R_2)}{R_2^2 } \right] &= r_0 - R_2 \\ \frac{v_{0-\text{máx}}^2}{2g \gamma} \left[ \frac{r_0+R_2}{R_2^2 } \right] &= 1 , \end{split} $$
entonces $$ v_{0-\text{máx}}= \sqrt{2g \gamma \frac{R_2^2}{r_0+R_2 }} $$
y, nuevamente, recordando las definiciones (2) y (3):
$$ \boxed{v_{0-\text{máx}}= \sqrt{ \frac{4ghR_2^2}{(R_1+R_2)(R_1+3R_2) }}}. $$
Finalmente, podemos decir que si $v_{0-\text{min}} \leq v_0 \leq v_{0-\text{máx}}$, la partícula no abandona la superficie.
Si todavía no lo hiciste y valoras el trabajo, siempre estas a tiempo de hacer tu aporte libre y voluntario. ¡Gracias!